
什么是原子力显微镜 (AFM)
原子力显微镜 (AFM)是一种高分辨率非光学成像技术,由 Binnig、Quate 和 Gerber 于 1985 年首次展示 [1]。从那时起,它已发展成为一种强大的表面分析测量工具。AFM 允许在空气、液体或超高真空中以非常高的分辨率 [2] 对样品表面的形貌、电、磁、化学、光学、机械等特性进行准确和无损测量。这种独特的功能组合使 AFM 在世界上最先进的科学和技术实验室中不可或缺。
原子力显微镜操作原理
具有光学反馈的标准 AFM 系统的基本操作原理 [3](图 1)涉及以光栅图案在样品表面上扫描带有锐利 AFM 尖端的AFM 探针。AFM 尖端通常由硅或氮化硅制成,并集成在柔性 AFM 悬臂的自由端附近 。甲压电陶瓷扫描器控制所述横向且相对于表面上的AFM探针的垂直位置。当 AFM 尖端在不同高度的特征上移动时,AFM 悬臂的偏转会发生变化。这种偏转被从 AFM 悬臂背面反射的激光束跟踪,并被引导到位置敏感的光电探测器. 甲反馈回路控制扫描仪的垂直延伸,以保持接近恒定的AFM悬臂偏转和因此恒定的相互作用力。将 AFM 尖端在扫描过程中跟踪的坐标结合起来,生成表面的 3D 地形图像。
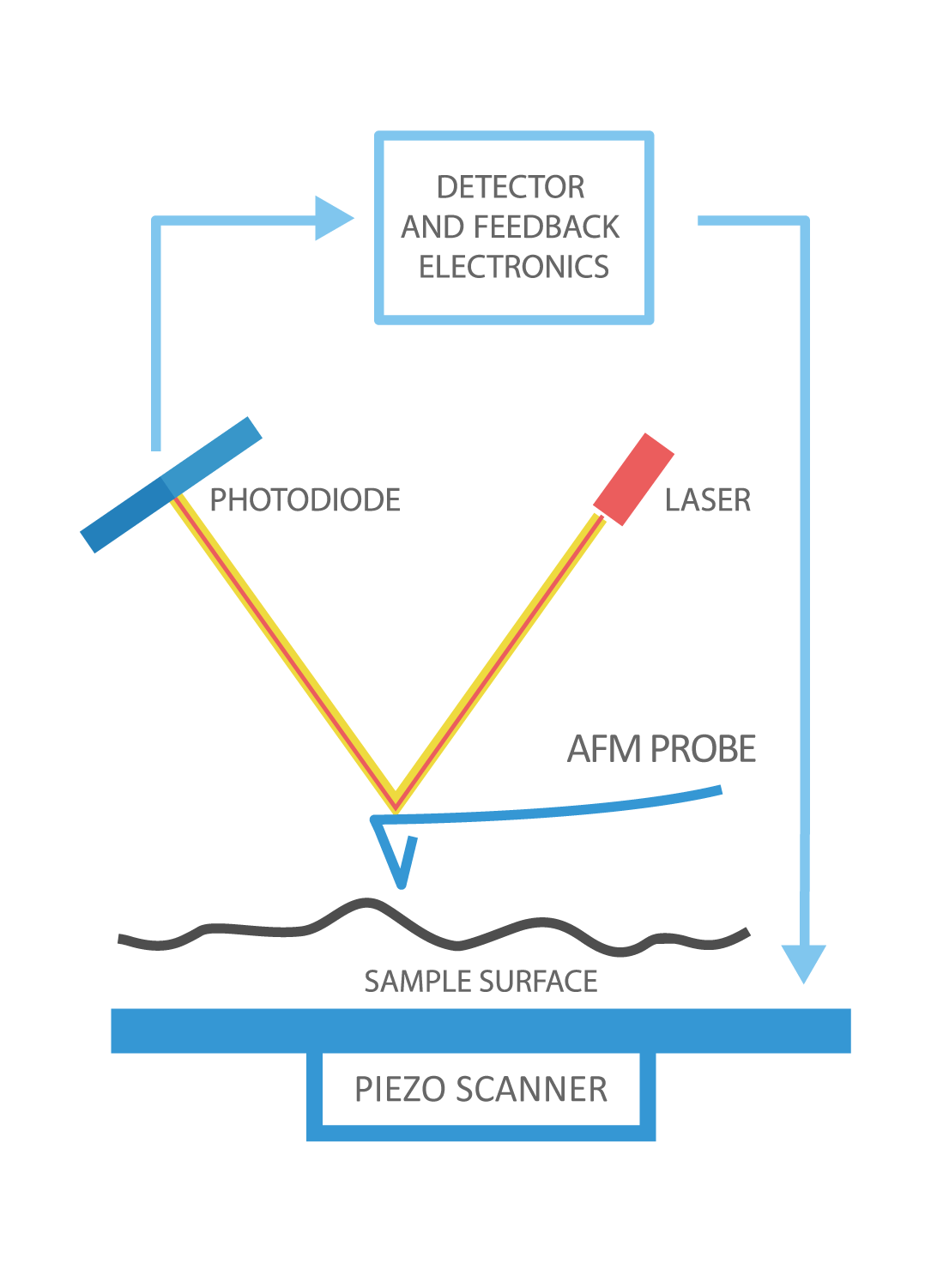 图 1. AFM 示意图。
图 1. AFM 示意图。
AFM 操作模式
使用原子力显微镜对表面形貌成像有两种基本模式:静态或接触模式和动态模式。根据 AFM 尖端和表面之间的相互作用力,动态模式进一步细分为轻敲或间歇接触和非接触模式。
1. 在接触模式下,AFM 探针尖端在样品表面上扫描,同时保持与样品表面的持续接触(图 2)。反馈系统旨在保持恒定的 AFM 悬臂偏转,从而保持恒定的相互作用力。AFM 尖端和表面之间的力是排斥的(图 3)。通常使用力常数≤1N/m 的软 AFM 悬臂,以最大限度地减少 AFM 尖端磨损和表面损伤,并提高灵敏度。
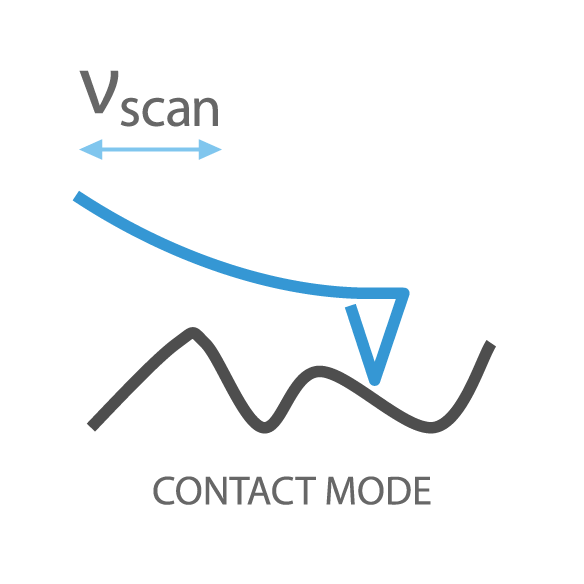
图 2. 接触模式 AFM 操作示意图。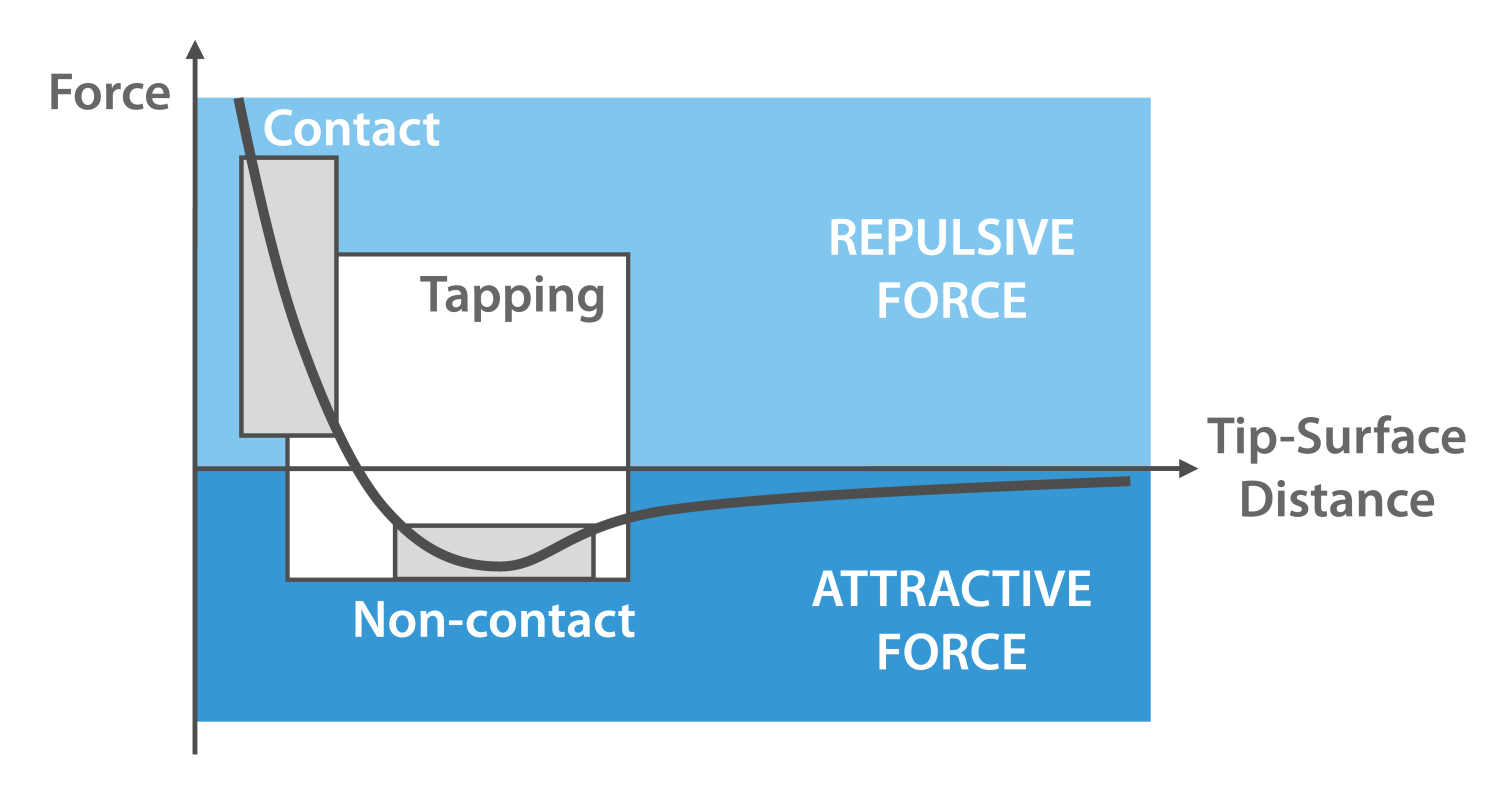 图 3. 接触、轻敲和非接触模式的操作区域。
图 3. 接触、轻敲和非接触模式的操作区域。
接触模式操作的主要缺点之一是软 AFM 悬臂上的 AFM 尖端对横向力的敏感性和粘附在环境空气中大多数表面上存在的表面污染层上。这些会导致图像失真。此外,横向力可能会损坏 AFM 探针尖端和软样品。
2. 在轻敲模式下, AFM 探针悬臂由压电致动器在其基本谐振频率处或附近振荡,通常为几十到几百千赫兹。AFM 探针朝向样品表面降低,以便 AFM 探针尖端稍微接触 AFM 悬臂振荡下端的表面(图 4),并且其振幅被阻尼。反馈回路保持恒定的 AFM 悬臂振荡幅度,因此保持恒定的相互作用力。支配 AFM 尖端和表面之间相互作用的力是排斥力(图 3)。
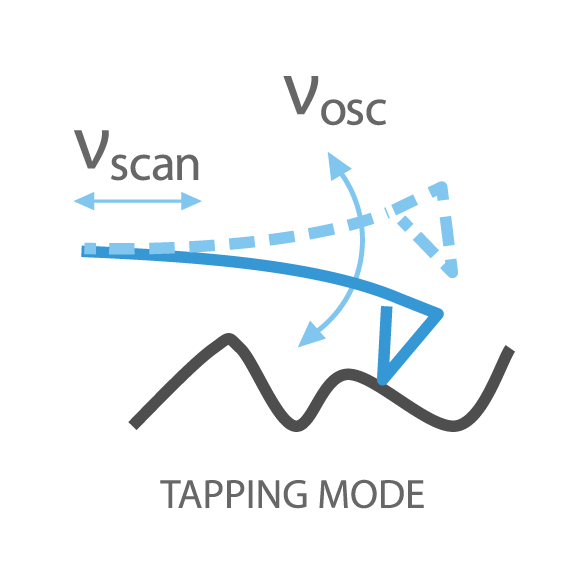 图 4. Tapping Mode 操作示意图。
图 4. Tapping Mode 操作示意图。
具有 10-100N/m 范围内的力常数和 >190kHz 的高共振频率的刚性 AFM 悬臂用于标准攻丝模式操作。在环境空气中测量时,这些 AFM 悬臂不会粘在表面上。为了测量软样品,例如活细胞,使用力常数 <10N/m 且有时低至低于 0.1N/m 的较软的 AFM 悬臂。
浏览 C>10N/m 和 f≥190kHz 的标准攻丝模式
AFM 探头 浏览 C<10N/m 和 f<190kHz 的软攻丝模式 AFM 探头
3. 在非接触模式下,AFM 悬臂在其共振频率或接近其共振频率处以比敲击模式更小的振幅(1nm 或更小)振荡,并且 AFM 探针尖端保持在几纳米到几十纳米的距离从表面(图 5)中的相互作用力区域 [4](图 3)。在某些情况下,反馈回路保持恒定的 AFM 悬臂振荡频率,因此保持恒定的相互作用力 (FM-AFM)。这种方法可以在液体中提供更精确的力控制和超高分辨率图像。
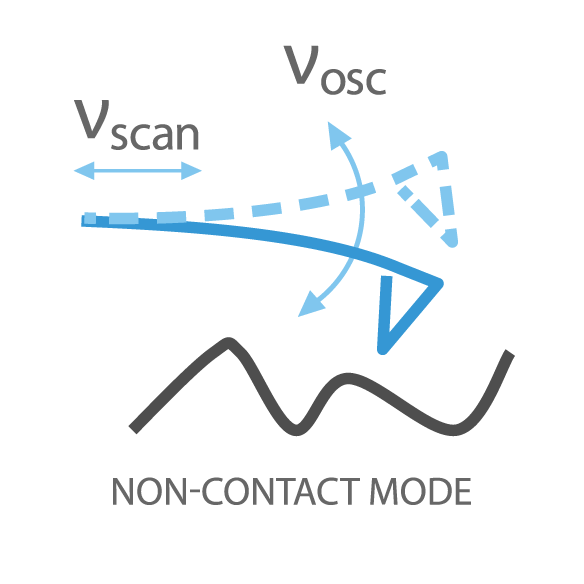 图 5. 非接触模式操作示意图。
图 5. 非接触模式操作示意图。
非接触模式的优势在于它提供了尖端和样品表面之间尽可能低的相互作用。小的相互作用力有助于保持 AFM 尖端的锐度并实现高分辨率。缺点是在有吸引力的机制中保持 AFM 尖端是具有挑战性的。对于小尖端表面距离,需要高性能反馈控制。
具有高力常数和高共振频率的 AFM 悬臂最适合非接触模式。
浏览 C>25N/m 和 f≥190kHz 的非接触模式 AFM 探针




